1.2 位置传感器
位置传感器在我们的日常生活中扮演着重要角色,因为它们广泛应用于家用产品、汽车以及办公或工业场所等。顾名思义,位置传感器提供被测物(被测量的量)位置的反馈。
引言
位置传感器通过确定目标的存在或缺失,或者通过检测其方向、速度、运动或距离,来提供运动控制、计数和编码任务。位置传感器可以检测物体的位置或电场、磁场的扰动,并将这些物理参数转换为输出电信号,以指示目标的位置。
随着技术的进步,传感器设备不断变得越来越小�、成本更低且性能更好,为更多应用领域打开了大门。
位置传感器的类型
位置传感器通常根据其感知方式被分为两大类:
- 接触式设备(Contact Devices)
- 非接触式设备(Non-contact Devices)
接触式位置传感器与被测物有物理接触。基于接触的传感器包括限位开关(Limit Switches)和基于电阻的位置传感器。在允许物体与传感器有物理接触的应用场景中,接触式传感器提供了简单且低成本的解决方案。
非接触式设备则不与被测物发生物理接触。它们包括磁性传感器、接近传感器、霍尔效应传感器和超声波传感器。
每种位置传感器都有其优势和局限性。目标是选择一种对于特定应用参数来说成本效益高的传感器。
基于电阻的位置传感器(Resistance Based or Potentiometric Position Sensor)
基于电阻的位置传感器也被称为电位器(Potentiometers)或位置变送器(Position Transducers)。它们最初是为军事应用而开发的。它们曾被用作收音机和电视机上的面板安装调整旋钮。电位器可以作为线性或旋转位置传感器使用。
电位器不需要电源或额外的电路来执行其基本的位置传感功能。因此,它们是被动式设备。它们以两种模式运行:电压分压器(voltage divider)和可变电阻(rheostat)。在可变电阻模式中,电阻随运动变化。因此,应用利用固定端子与滑动接触点之间的变化电阻。电压分压器具有真正的电位器操作。在这种模式下,参考电压被施加到电阻元件上。通过计算滑片拾取的电压来确定可移动滑片的位置。
电位器是最常用的位置传感器。它有一个固定端子和一个连接到机械轴上的滑片端子。运动可以是线性的(滑动)或角的(旋转)。这种运动会导致固定端子和滑片端子之间的电阻发生变化。输出电信号通常是电压,它与滑片在电阻轨道上的位置成比例变化,因此也与电阻值成比例变化。
电位器有多种尺寸和设计。常见的类型包括线性滑动型和旋转型。当用作位置传感器时,被测物体连接到其滑动部件上。
电位器的结构如下图所示。

在电位器的两个固定端子之间施加一个参考电压,这两个端子分别位于滑片的两侧,输出电压从这个滑片处取出。这种配置形成了一个电压分压网络,输出电压取决于滑片的位置。

如果对电位器施加12V的电势,输出电压的最大值为12V,最小值为0V。根据滑片的位置,输出电压可以是0V到12V之间的任何值。如果滑片位于电阻轨道的中心,输出电压为6V。

电位器的构造如下图所示。

对于一般用途的位置传感,低成本的电位器就足够了。电位器的优点是成本低、操作简单、应用理论简单、易于使用且对电磁干扰(EMI)有较强的抵抗力。缺点是由于滑动的滑片最终会磨损、感测角度较小以及精度较低。电位器作为位置传感器的主要缺点是其物理尺寸,因为它限制了滑动部件的运动,进而限制了输出信号。典型电位器的感测角度范围为0°到最大2400°到3300°之间。可以通过使用游标刻度来实现多圈能力。
一个简单的位置传感电路如下图所示。

它由一个运算放大器(OP amp)和一个基于电位器的位置传感器组成。输出电压取决于滑片的位置。
碳膜是电位器中最常用的电阻轨道类型。但存在接触噪声,这种噪声叠加在预期的电阻上。接触噪声是由于滑片与电阻表面之间的机械接触产生的。这可能导致总电阻的5%的误差。
绕线式电位器使用直导线电阻元件或绕制的电阻线圈。绕线式电位器的问题是滑片在位置间跳动,产生对数输出信号。
对于高精度和低噪声应用,有聚合物薄膜或金属陶瓷(cermet)类型的电位器。这些由导电塑料电阻材料制成。它们在滑片与表面之间摩擦非常小,因此电气噪声小、分辨率高且寿命长。这些电位器既有单圈设备,也有多圈设备。这些设备用于高精度应用,如操纵杆、工业机器人等。
电容式位置传感器(Capacitive Position Sensors)
电容式传感器是非接触式设备,用于精确测量目标位置(如果目标是导电的),或者用于测量材料的厚度和密度(如果目标是非导电的)。当与导电目标一起使用时,它们不受目标材料的影响,因为所有导体对电容式传感器来说看起来都一样。目标的厚度也不重要,因为传感器感知的是目标的表面。
它们主要用于硬盘驱动器、半导体技术和高精度制造行业,这些领域对高精度和频率响应有很高的要求。当与非导电目标一起使用时,它们通常用于标签检测器、涂层厚度监测器以��及纸张和薄膜厚度测量单元。
电容式传感器主要用于测量从几毫米到纳米的线性位移。电容式传感器利用电学性质——电导率来测量位置。一个物体储存电荷的能力称为电容。最常用的储存电荷的装置是平行板电容器。平行板电容器的电容与其极板的表面积和介电常数成正比,与极板之间的距离成反比。因此,当极板之间的间距发生变化时,其电容也会发生变化,电容式传感器就是利用了这一特性。
电容的计算公式为:
其中:
- 是介质的相对介电常数
- 是自由空间的介电常数
- 是极板的重叠面积
- 是极板之间的距离
典型的电容式传感模型由两个金属板组成,它们之间以空气作为介质。传感器或探头是其中一个金属板,而目标物体(导电的)是另一个极板。
当对导体的极板施加电势时,会在它们之间产生电场,使正电荷聚集在一个极板上,负电荷聚集在另一个极板上。
电容式传感器使用交流电压。交流电压使电荷不断在其位置之间反转。通过监测电容探头与目标之间的交替电场的变化,并将其用于测量探头与目标之间的电容。电容由表面的面积、介电常数和表面的间距决定。在大多数电容传感应用中,电容传感器和目标的大小和面积不会改变。导电表面之间的介质材料也不会改变。唯一导致电容变化的因素是电容传感器与目标之间的距离或间距。
因此,电容是目标位置的一个指标。电容式传感器被校准为产生一个输出电压,该电压对应于探头与目标之间的距离变化,从而导致电容变化。这被称为电容式传感器的灵敏度。电容式传感器的灵敏度是电压变化与距离变化的比率。通常使用的灵敏度设置是1V/100微米,即距离每变化100微米,输出电压变化1V。
电容式传感器探头由三个部分组成:感应区域、屏蔽区域和主体。

电容式传感器探头的电势被施加到感应区域。存在一个问题,即电场会扩散到除了定义的感应区域和目标之外的区域。为了防止这种情况发生,采用了一种称为屏蔽的技术。在这种技术中,通过在感应区域的侧面和背面周围创建一个屏蔽区域,并将其保持与感应区域相同的电势,从而防止电场扩散。由于屏蔽区域和感应区域处于相同的电势,它们之间不会产生电场。任何其他导体,除了感应区域之外,都会与屏蔽区域形成电场。感应区域和相应的目标不受干扰。
由于这种屏蔽,感应区域的电场投影将是圆锥形的。探头的电场在目标上覆盖的面积大约比传感器面积大30%。因此,标准校准要求目标的最小直径至少为感应区域直径的30%。

探头的测量范围与其感应区域的大小成正比。较小的探头需要更靠近目标,以实现所需的电容量。探头与目标之间的最大允许间隙大约是感应区域直径的40%。超过这个范围,探头将变得无用。在某些应用中,会同时使用多个探头。在这些应用中,同步所有探头的激励电压是至关重要的。如果电压不同步,探头之间会相互干扰,因为一个探头可能会增加电场,而另一个探头则会减少电场。这会导致错误的读数。
电容式传感器也可以与非导电目标一起使用。非导电目标的介电常数是其工作的基础。像塑料这样的非导电材料的介电常数与空气不同。当非导电材料用作两个导电极板之间的介质时,其介电常数将决定导体之间的电容。

电容式传感器用于非导电材料时,两个导电极板分别是传感器探头和接地的导电参考。电容的变化以及因此传感器的输出将对应于材料厚度、密度或成分的变化。
有些高精度、高性能的电容式传感器可以测量纳米级的位移。这些高性能传感器对温度变化稳定,输出线性,并且具有高分辨率。
与其他非接触式设备相比,电容式传感器具有高分辨率、成本低且对目标材料不敏感的优点。然而,电容式传感器并不适用于环境干燥或潮湿且探头与目标之间距离较大的情况。
电感式位置传感器
电感式传感器是一种非接触式设备,用于精确测量导电目标的位置。电感式传感器用于识别任何导电金属目标。
电容式传感器利用电场来感知导电目标的表面,而电感式传感器则利用穿透目标的电磁场。电感式传感器探头包含一个振荡器,该振荡器产生高频电磁场。这个电磁场从探头的感应面辐射出来。

当这个电磁场接触到导电金属目标时,会在金属目标内感应出一个小电流。这些电流会产生自己的电磁场,从而干扰探头产生的电磁场。这会导致探头发出的信号振幅发生变化。输出电压可以根据这种变化进行校准。当探头靠近目标时,与探头产生的电磁场相互作用的电流更多,因此输出信号更强。
与电容式传感器不同,电感式传感器与探头和目标之间的材料无关。因此,它们可以在恶劣环境中使用,例如在探头和目标之间的空隙中可能出现油或其他液体。
目标材料是电感式传感器的一个重要因素。像铝、钢和铜这样的材料,对传感器的反应各不相同。因此,为了达到最佳性能,传感器必须针对每个目标进行校准。
通常,电感式传感器的目标材料分为两类:铁磁性和非铁磁性。铁磁性材料具有磁性,而非铁磁性材料则没有磁性。铁磁性材料包括铁和大多数钢材,而非铁磁性材料包括锌、铝、铜和黄铜。一些电感式传感器可以同时识别铁磁性和非铁磁性目标材料,而另一些则只能识别其中一种材料。
目标的尺寸也很重要,因为探头的电磁场的有效面积会因传感器而异。最低要求是目标的横截面积至少为探头线圈直径的300%,即理想情况下,目标的表面积至少应为探头直径的三倍。

目标的厚度也是一个重要因素,因为电磁场会穿透目标并产生电流。目标的厚度取决于驱动探头的信号频率,且与频率成反比,即当驱动频率增加时,目标的最小厚度会减小。
对于1MHz的驱动频率,一些常用目标材料的最小厚度如下:
- 铁 — 0.6 mm
- 不锈钢 — 0.4 mm
- 铜 — 0.2 mm
- 铝 — 0.25 mm
- 黄铜 — 1.6 mm
具有模拟输出信号的电感式传感器以其纳米级分辨率、短响应时间、80 kHz或更高的频率响应、重复精度以及对环境污染物的免疫力而闻名。
电感式传感器的输出电压和电流与传感器和目标表面之间的距离成正比,即电压和电流代表与距离相对应的绝对测量值。这一特性被广泛应用于众多领域。
线性可变差动变压器(LVDT)
线性可变差动变压器(LVDT)是一种常见的机电式、高分辨率、接触式线性位置变送器。LVDT是目前可用的最可靠、最准确的线性距离测量方法之一。LVDT被广泛应用于计算机化制造、机床、航空电子设备和机器人技术中。
线性可变差动变压器是一种将位置转换为电信号的传感器。LVDT由三个线圈组成,一个初级线圈和两个次级线圈。一个可移动的磁性芯(也称为衔铁)如图所示放置。这个磁性芯控制LVDT中初级线圈和次级线圈之间的电流传输。LVDT的输出与芯的位置成正比。
LVDT的横截面视图如下所示。
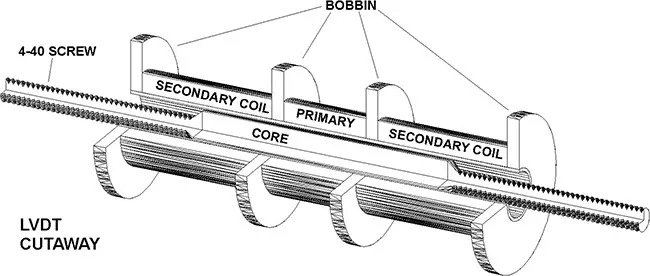
磁性芯在由初级线圈和两个相同的外侧次级线圈组成的变压器内线性移动,这些线圈以圆柱形方式缠绕。
当初级线圈被交流电激励时,会在次级线圈之间感应出电压。次级线圈的电压会根据磁性芯在轴向移动时在两个线圈之间的位置而变化。输出电信号等于两个次级绕组之间的电压差。因此,输出电压与磁性芯的线性机械运动成正比。
LVDT的常规变压器式表示如下图所示。

LVDT的原理图如下所示。

LVDT的原理
LVDT的初级线圈通过施加恒定幅度的交流电源进行激励。这会产生一个磁场,由中心的磁性芯将产生的磁通量耦合到次级线圈S1和S2。次级线圈彼此反相缠绕。因此,当磁芯正好位于两个次级线圈的中间时,耦合到S1和S2的磁通量相等。每个次级线圈中感应的电压和也相等。因此,输出差分电压为零。
当线圈从中心位置移动时,每个次级线圈中感应的电压不同。当磁芯向S1移动时,与S1耦合的磁通量大于与S2耦合的磁通量。因此,感应电压增加,而减小。
差分输出电压为:
如果磁芯或衔铁向次级线圈S2移动,与S2耦合的磁通量大于S1。感应电压增加,而减小。
因此,输出电压为:
输出信号的相位可以确定磁芯的位置。
如果次级线圈之间存在任何不匹配或任何漏感,仅靠LVDT的输出电压将无法确定磁芯的位置。信号调理电路有助于消除这些困难。
一个普通的LVDT如下图所示。

带有信号调理电路的LVDT如下图所示。

它包括一个额外的滤波和放大电路,其中两个输出信号的绝对值被相减。绝对值电路可以由二极管电容整流器构成。滤波器用于检测两个次级电压的幅度。这种技术适用于测量关于中心位置的正负变化。
LVDT作为位置传感器比电位器有许多优势。由于磁芯不接触线圈,线圈和磁芯之间没有机械接触。因此,实现了无摩擦操作,这在测试和高分辨率设备中非常有用。这也是它们使用寿命更长的一个重要因素。
由于其电磁耦合原理和无摩擦操作,LVDT可以测量极其微小的变化。
电感式接近传感器(Inductive Proximity Sensors)
电感式接近传感器是一种低成本、固态、非接触式设备。它们主要用于检测金属物体,这些金属物体可以是铁磁性的,也可以是非铁磁性的。电感式接近传感器的基本组件包括一个线圈、一个振荡器、一个检测电路和一个输出电路。

当交流电通过线圈时,会产生一个高频磁场。如果一个金属物体靠近这个磁场,线圈的电感会发生变化。由磁场在物体中感应的涡流会改变振荡的幅度。解调器会检测到幅度的变化,并将其转换为直流信号。这个直流信号触发触发器,输出级切换。

电感式接近传感器无需任何额外设备即可操作电磁离合器、制动器和阀门。为了激活传感器,可以使用任何形状和大小的金属,或者使用气缸、机床滑座或钻头。
电感式接近传感器忽略非金属物体,如油、水、灰尘等。它能够在冲击环境中工作,并且具有短路抵抗力。
它们被用于工业自动化中用于计数产品,在安全系统中作为金属探测器,以及在军事应用中用于探测地雷和其他武器。
基于霍尔效应的磁性位置传感器(Hall Effect Based Magnetic Position Sensors)
磁性位置传感器通过检测由地球、电流、磁铁甚至脑电波活动产生的磁场的强度、方向或存在来确定物体的位置。磁性位置传感器是非接触式设备,在许多工业和导航系统中非常重要。
磁场是一个矢量量,既有大小也有方向。一些传感器测量磁场的大小,但不测量方向。这些是标量传感器。其他传感器测量其主敏感轴上磁化的分量的大小。这些是单向传感器。一些传感器包括磁场的方向及其大小。这些是双向传感器。
霍尔效应传感器是一种磁场传感器,可用于检测位置、压力、电流、温度等。
一个通用的霍尔效应传感器如下图所示。
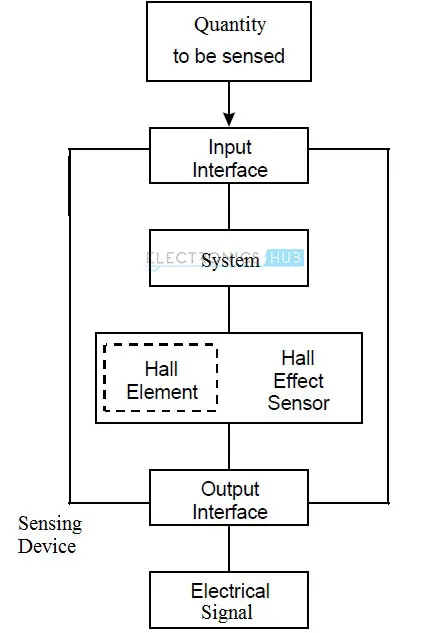
霍尔效应传感器作为位置传感器时,可以非常精确且经济实惠。霍尔效应传感器由霍尔元件组成,该元件由薄片导电材料构成。霍尔元件的输出连接与电流流向垂直。当霍尔效应传感器置于磁场中时,它会产生一个与磁场强度成比例的输出电压。需要额外的电子电路,如信号调理电路,以实现有用的电压水平,因为原始输出电压非常小。因此,一个基本的霍尔效应传感器由霍尔元件和集成电路上的信号调理电路组成。
霍尔效应原理表明:“当通电导体置于磁场中时,会产生一个与电流和磁场都垂直的电压。”
考虑一片薄的导电材料。电流通过该材料,输出连接与电流流向垂直。

在没有磁场的情况下,电流分布是均匀的,输出没有电位差。
在存在与电流方向垂直的磁场时,洛伦兹力作用于电流。这种力会扰乱电流分布,并在输出端产生电位差。

霍尔效应传感器有数字输出和模拟输出两种形式。在数字输出传感器中,输出处于“开”状态或“关”状态。数字霍尔效应传感器有两种类型:双极型和单极型。双极型传感器需要正高斯(南极)来工作,负高斯(北极)来释放。通过将正高斯或南极移开传感器来实现释放。单极型传感器只需要一个磁极就可以工作。
在模拟输出传感器中,输出电压是连续的,并且取决于磁场的强度。输出电压随着强磁场而增加,随着弱磁场而减少。它们通过靠近磁极之一来工作。
考虑以下霍尔效应传感器的布置。
它由四个具有数字输出的单极传感器组成,这四个传感器连接在一起并安装在一个铝制外壳中。这些传感器由连接到液压系统的四个独立的磁性执行器激活。传感器产生事件信号,这些信号代表从参考表面测量的距离。这些信号定义了被测物体必须产生电信号的可接受范围。
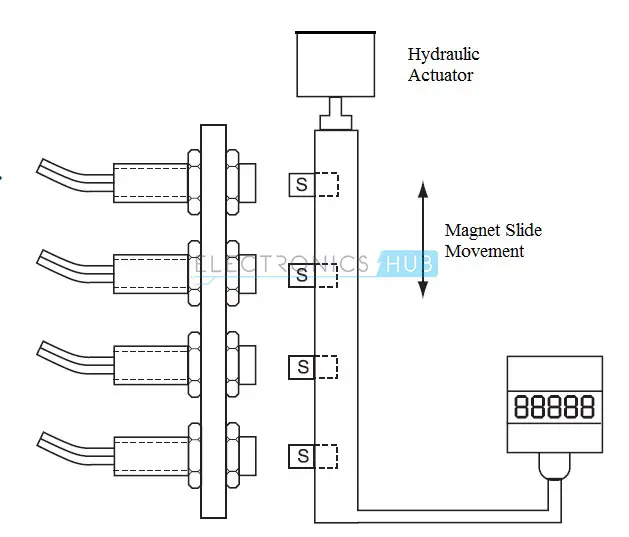
以下装置用于实现0.002英寸的线性定位精度。它由四个具有数字输出的双极传感器组成。它们由安装在杆上的磁铁激活。

霍尔效应传感器的优点是使用寿命长、速度高,工作温度范围为-40°C到150°C。
基于涡流的位置传感器(Eddy Current Based Position Sensor)
涡流传感器是非接触式设备,用于测量导电目标的位置、位移、振动和振荡。涡流传感器用于需要高精度且工作环境恶劣的应用。
涡流传感器基于电磁感应原理工作。一个简单的涡流传感器由一个驱动器和一个感应线圈组成。当交流电通过线圈时,会产生一个交变磁场。当目标与这个磁场接触时,目标中会感应出一个小电流。这些电流称为涡流。目标中的涡流会产生一个与传感器磁场相反的场,从而抵抗该场。传感器与目标之间的距离是两个磁场相互作用的因素。因此,输出电压被校准以反映磁场相互作用的变化,这取决于距离。目标的表面积必须至少是探头直径的三倍。

涡流传感器的优点是成本较低、能够承受恶劣和肮脏的环境、体积小,并且对传感器与目标之间的材料类型不敏感。
在需要高分辨率且传感器与目标之间的距离较大的应用中,涡流传感器不太适用。
旋转编码器(Rotary Encoders)
旋转编码器是一种机电设备,将角运动转换为模拟值或数字代码。它也被称为轴编码器。当编码器的轴或轴旋转时,旋转编码器提供值。产生一个与旋转角度成比例的输出信号。根据输出信号,编码器分为两种类型:增量式和绝对式。
增量式编码器的输出为方波形式,提供有关轴运动的信息。这些信息被处理为速度、位置、距离和转速(RPM)。
绝对式编码器的输出为位置的绝对测量值,即它们指示轴的当前位置。这使它们成为角度传感器。增量式和绝对式编码器都有两种结构设计:光学式和机械式。
在需要将机械运动转换为数字信息的应用中,增量式编码器是最受欢迎的选择。
增量式编码器的结构如下图所示。
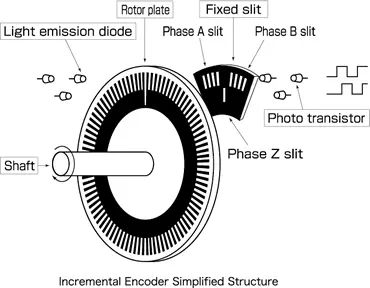
增量式编码器提供与轴的旋转位移成比例的脉冲串输出,即仅当编码器的轴旋转时才提供输出。为了确定旋转量,使用一个计数器来计数输出脉冲的数量。从某个输入轴位置开始,为了使编码器检测到旋转量,计数器在参考位置处复位,从该位置开始,计数器累加脉�冲数量。参考位置可以是任意位置,且计数可以是无限制的。
增量式编码器有两种通道类型:单通道编码器和正交编码器。当系统仅在一个方向上旋转时,使用单通道编码器。这些通常被称为测速发电机,仅提供位置和速度信息。正交编码器具有两个相位相差90°的输出信号。因此,正交编码器能够为复杂的运动应用提供高速双向信息。
增量式光学编码器用于需要高转速且高精度计算的应用中。机械式增量编码器通常用作数字电位器,并且需要消抖处理。
绝对式编码器为轴的每个不同角度产生一个独特的二进制代码输出。该代码可以是格雷码、格雷码过量或自然二进制码。即使在断电后,绝对式编码器的轴位置始终是已知的。
绝对式编码器的结构如下图所示。
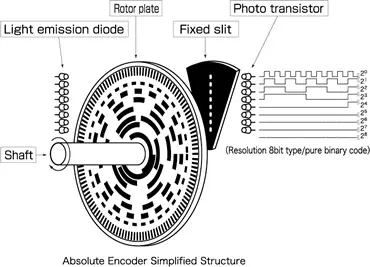
光学绝对式编码器由一个带有不透明和透明区域的玻璃或塑料圆盘组成。使用像LED这样的光源和光电探测器阵列来读取圆盘在任何时刻的位置所产生的光学图案。
光学位置传感器
光学传感器将光信号转换为电信号。它们是非接触式传感器,类似于光敏电阻,能够测量物理量,并将其转换为任何适当仪器可读的形式。光学传感器可以测量以下物理量:温度、压力、流量、液位、位移、位置、旋转、振动、加速度、力、速度、应变、辐射、pH值、磁场、电场、声场。
通常,使用光学传感器的系统包括三个子系统:光源、测��量装置和光学传感器。这些子系统连接到一个电触发器,该触发器对光传感器中的信号变化做出反应。
光学位置传感器的一个例子是位置敏感探测器(PSD)。位置敏感探测器可以检测入射光的位置数据,能够跟踪非常小的位置变化,并提供高速响应、高可靠性和高位置分辨率。
光纤位置传感器
光纤传感器使用光纤作为感测装置,可用于测量温度、应变、压力、位移、速度和加速度。光纤位置传感器利用光纤内部光的逆向反射,这种反射是由于近端镜面的移动而产生的。光纤位置传感器对电磁辐射、磁场、闪电以及许多其他恶劣环境条件具有免疫力,并且通常用于长距离位置感测。
光纤位置传感器由两部分组成:嵌入被动传感器中的光学技术以及主动控制器。这两部分通过全双工光纤链路连接。控制器用于发送光信号,它以类似条形码的形式向编码盘发送光脉冲。编码盘旋转时,盘上的编码在每个位置都是唯一的。只有在特定波长下,条码才会反射光,并且特定颜色的光会通过单独的光纤返回到控制器。控制器对光的波长进行分析,并产生适当的二进制输出。
光纤传感器分为两种类型:内在型和外在型传感器。
- 内在型传感器:被测量的物理量会调制感测光纤的传输特性,这些特性包括强度、偏振、相位等。
- 外在型传感器:调制过程发生在光纤外部。在这种情况下,光纤仅作为传输光的通道,将光从传感器头传输到外部,并从外部传输回传感器头。
光纤位置传感器的优点包括:
- 对电磁辐射免疫。
- 由电绝缘材料构成。
- 具有宽温度范围。
- 能够复用信号。